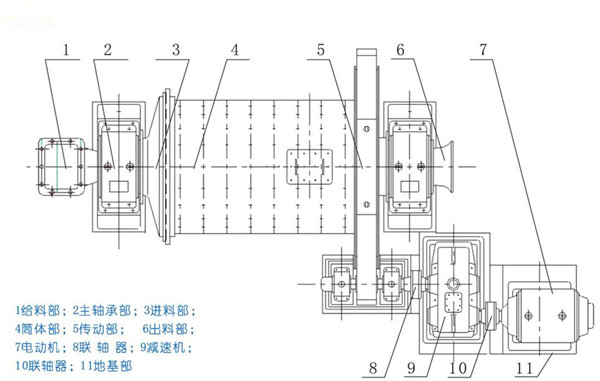
球磨机系统的仿真研究
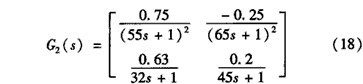
基于球磨机系统的时变性,采用多个模型描述其动态特性。系统输出信号Y=[TP]T,输入信号U=[RW]T,则被控对象可描述为Y=GU。其中,T为磨出口温度,P为传递函数矩阵。文献对某球磨机在不同工况下的运行情况进行辨识,得到不同工况下相互耦合的温度和负压回路的两模型如下:
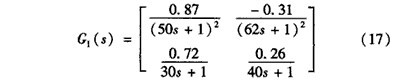
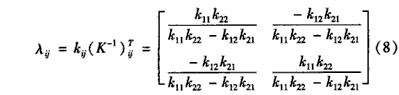
按照G1(s)进行设计,由下公式(8)可知系统的相对增益矩阵为
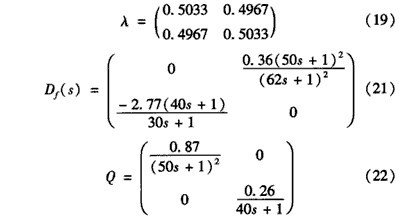
由公式(19)可知配对方式选择对角线配比,即热风量R控制温度T,再循环风量W控制负压P,负荷工艺要求。按照表1求得此球磨机系统的逆向解耦控制器为:

解耦后的被控对象变为两个单回路系统,即将本例与传统的对角矩阵解耦控制方法比较,把对角矩阵解耦控制中的解耦控制器记为D,期望的对角矩阵仍为Q,则有:
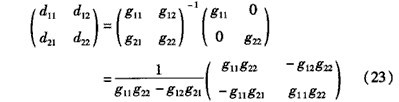
虽然逆向解耦和对角阵解耦均可将球磨机系统解耦成两个单回路系统,但由分析可知该对解耦矩阵含有s的6次项,实际构造结构太复杂,不利于工程实现,并且计算量很大。而逆向解耦控制器结构简单,动态解耦效果良好,易于物料实现,突显了其适合与高阶的过程对象解耦的优点。
对解耦后的广义被控制对象进行内模控制器设计,得内模控制器为:
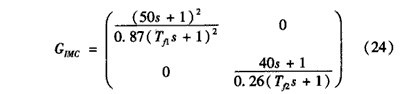
其中的 ,
, 为滤波器的时间常数,其值通过Simulink进行防真求得。根据控制输出的动态性能求得滤波器的时间常数
为滤波器的时间常数,其值通过Simulink进行防真求得。根据控制输出的动态性能求得滤波器的时间常数 。
。
根据前问介绍的IMC-PID转换方法得到本系统PID控制器参数为:

根据此参数对加解耦合的广义被控制对象进行PID控制器设计及Simulink仿真,如图4所显示。
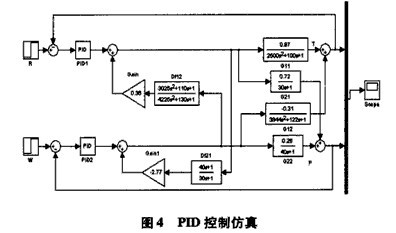
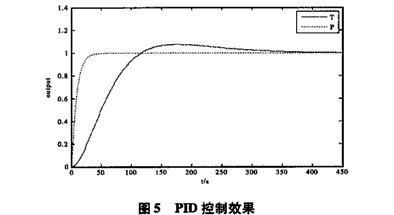
PID控制的阶跃响应控制仿真结果如下图5所显示。
基于球磨机系统的时变性,当被对象由G1(s)变为G2(s)时,验证所设计的PID控制器对被控对象的鲁棒性,仿真结构如下图6所显示。
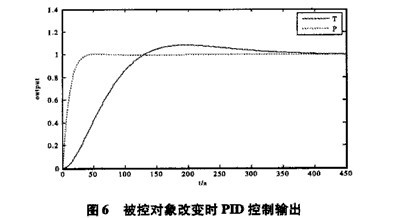
由上图5和图6的仿真曲线可以看出,在标称情况下,磨出口温度和磨入口负压的阶跃响应的动态性能参数良好,超调较小,响应速度较快,基本无耦合作用。并且在当被控对象改变时,所整定的PID控制器不仅有良好的调节性能还有很好的鲁棒性能,其系统输出响应性能指标没有恶化。
上一篇:测量球磨机衬板受力的详细方法
下一篇:球磨机设备翼缘板的卷制工艺