球磨机系统的BEL模型辨识算法
本文是利用BEL模型建立球磨机系统的正向模型和逆模型。
一、球磨机系统正向模型辨识
基于BEL模型在线辨识球磨机正向模型的结构图如所显示。
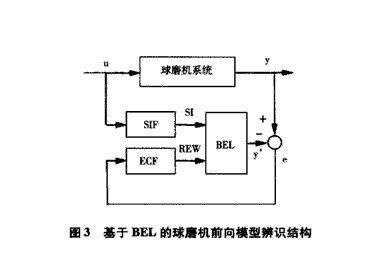
其中SIF为感官输入函数,ECF为情感暗示函数,u为球磨机系统控制输入,y为球磨机系统输出,y为BEL向辨识模型输出,e为辨识误差。BEL模型与球磨机并联,输出误差用来调整BEL模型链接权值。
BEL与实际系统相差,必须首先确定输入信号SI和REW的函数形成,它们与系统输入输出和误差有关。一般选择SI为系统输入u、误差信号e和系统输出y的函数,REW为误差信号e、BEL模型输出MO或系统输出y的函数,REW为误差信号e、BEL模型输出MO或系统输出y的函数,本文选择SI和REW形式如下:
SI=F(u)=k1u(t) REW=J(e)=k2e(t)+k3∫e(t)dt其中,k1、k2、k3为权重调节系数。
二、球磨机系统逆横型辨识
基于BEL模型在辨识球磨机正向模型的结构如下图所显示。
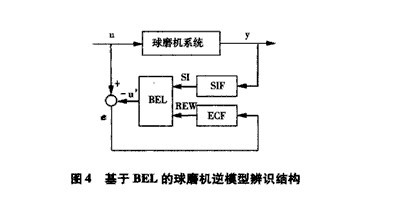
系统输出y和误差e经过SIF和ECF作为BEL输入,经过情感学习后,BEL模型输出与求o既系统输入信号u趋于一致。在球磨机系统逆模型辨识结构中,选择SI和REW形式如下:
SI=F(y)={r1y(t) r2y(t)} REW=J(e)=r3e(t)+r4∫e(t)dt 其中,r1、r2、r3、r4为权重调节系数。
采用BEL辨识球磨机系统的算法步奏如下:
1、设定BEL模型输入信号SI和REW和重调节系数k1~k2、r1~r4,BEL模型权值学习率a、β,杏儿体和眶额皮质节点权值Vi 、Wi初始化为零;
2对正向模型辨识依据式(SI=F(u)=k1u(t) )、(REW=J(e)=k2e(t)+k3∫e(t)dt)计算SI和REW,逆模型辨识则依据式(SI=F(y)={r1y(t))、(REW=J(e)=r3e(t)+r4∫e(t)dt)计算SI和REW;
3、利用式 和
和 分别计算杏儿体输出A和眶额皮质输出0;
分别计算杏儿体输出A和眶额皮质输出0;
4、利用式(MO=A-O)计算BEL模型输出y(正向模型)或者u(逆模型),与球磨机系统输出y(正向模型辨识)或球磨机系统输入信号u(逆模型辨识)或球磨机系统输入信号u(逆模型辨识)进行比较得辨识误差e;
5、根据( )、(
)、( )分别调BEL模型节点权值Vi、Wi;
)分别调BEL模型节点权值Vi、Wi;
6、若精度满足要求或达到设定实际,计算停止,否侧转2。
上一篇:球磨机闭路系统的筛分和改造方法
下一篇:球磨机主轴承的技术改造方案